无人机测绘流程:软件有哪些、数据处理和精度
做无人机测绘项目时,很多新手把重点放在“软件能不能跑出正射影像”,结果交付时才发现坐标偏了、边界变形、DEM 有噪声、检查点精度不合格。真正稳定的做法,是把外业采集、像控点、空三解算、正射纠正、点云分类、GIS 入库和精度检查连成一套可复现流程。
本文围绕一个常见项目场景展开:用无人机完成小范围地形或园区测图,需要输出正射影像、DSM/DEM、点云、三维模型或矢量底图。我们会讲清楚整体步骤怎么安排、软件如何选择、后期数据怎样处理,以及最终质量应该怎样验证。

问题背景:无人机测绘为什么不是飞完就能出图
同一架无人机、同一套软件,在不同项目里可能得到完全不同的成果质量。原因很简单:摄影测量不是普通拍照拼图,而是利用大量重叠影像、相机参数、POS 数据、像控点和检查点共同恢复地物的空间位置。外业条件不好,后期软件很难“补救”出可靠坐标。
常见返工问题有四类。第一,航线重叠度不足或照片模糊,导致空三匹配失败。第二,像控点数量少、分布偏在一侧,成果看起来能叠上底图,但局部变形很大。第三,坐标系、高程基准和单位没有统一,正射影像进入 QGIS 或 ArcGIS Pro 后位置偏移。第四,只看软件报告里的控制点残差,却没有用独立检查点验证成果精度。
所以,一个可靠项目应该从成果需求倒推流程。要做展示底图、地形测量、土方量计算、地籍辅助判读、巡检记录或三维实景,每种目标对 GSD、重叠度、像控点、高程模型和输出格式的要求都不一样。先把用途说清楚,再选择设备、航线、软件和检查方法。
核心原理:航测成果是一条几何约束链
这套工作的核心,是让每张照片在三维空间中找到正确的位置和姿态。软件会先识别不同照片中的同名点,再通过空中三角测量计算相机外方位元素,随后生成稠密点云、DSM、DTM、正射影像和三维模型。这个过程依赖足够的重叠影像,也依赖准确的地面控制。
几个概念要先分清。GSD 是地面采样距离,可以理解为一个像素对应地面的实际尺寸;RTK 或 PPK 可以提高照片位置初值,但不等于自动保证最终成果合格;GCP 是参与解算的地面控制点,Checkpoint 是不参与解算、专门用来验收精度的检查点;DSM 表示包含建筑、树木等地表物体的表面模型,DTM 或 DEM 更接近裸地地形。
从工程角度看,成果质量不是某个按钮决定的,而是由外业采集质量、控制点质量、相机标定、空三稳定性、坐标基准、点云分类和成果质检共同决定。任何一环出错,后面都可能出现位置偏、边缘拉花、建筑倾斜、水面破碎或高程异常。
不要把“软件生成成功”当成“测绘成果合格”。测绘项目最终要看独立检查点、坐标基准、成果完整性和业务可用性。
无人机测绘流程:从任务设计到成果交付
下面这套步骤适合教学、园区测图、农田调查、施工场地和小流域地形采集。不同项目可以删减环节,但不建议跳过需求确认、控制点检查和成果质检。
第一步:明确成果类型和精度目标
先写清楚要交付什么。常见成果包括正射影像 GeoTIFF、DSM、DEM、LAS/LAZ 点云、OBJ/OSGB/3D Tiles 三维模型、等高线、地物矢量和面积统计表。不同成果对应不同处理策略:正射底图重视视觉连续性,DEM 重视地面点分类和高程可靠性,土方量计算重视同一坐标和高程基准下的前后期差异。
精度目标要来自项目要求、合同或行业规范,不要用软件宣传语替代验收标准。如果只是做教学演示,可以明确为“练习流程”;如果用于工程量、权属边界或施工验收,就必须设计像控点、检查点和测量记录。
第二步:设计航线、GSD 和重叠度
航线设计要围绕目标 GSD、地形起伏、建筑高度、飞行安全和影像重叠来做。一般项目会设置足够的航向重叠和旁向重叠;建筑密集、立面复杂或三维建模项目,还需要倾斜摄影航线或交叉航线。地形起伏明显时,应关注相对航高,否则山坡区域的实际 GSD 和重叠度会变化很大。
飞行前要检查禁飞区、风速、光照、云影、反光水面、电线、起降点和应急返航高度。对航测项目来说,照片清晰度和覆盖完整性比后期参数更重要。模糊照片、漏飞区域和强反光水面,往往是后处理失败的根因。
第三步:布设像控点和检查点
像控点应覆盖测区四周和内部,避免全部集中在道路一侧或测区边缘。检查点要独立于解算过程,用来验证成果精度。点位应选择影像上容易识别、实地稳定、无遮挡的位置,例如喷绘标靶、硬化地面角点、清晰道路标线或固定构筑物角点。
像控点测量要记录坐标系、高程基准、测量方法、点号、照片和原始观测文件。很多精度异常不是摄影测量算法造成的,而是外业点号写错、坐标列顺序颠倒、椭球高和正常高混用,或者把同一个点既当控制点又当检查点。
第四步:飞行采集并整理原始数据
外业结束后不要急着导入软件。先按项目建立目录,保存照片、POS 文件、RTK/PPK 数据、像控点坐标、检查点坐标、飞行日志和现场照片。文件名、点号和坐标单位要保持一致。
project_069_drone_mapping/
01_raw_images/
02_pos_rtk_ppk/
03_gcp_checkpoint/
04_processing/
05_outputs/
06_qc_report/如果照片来自多架次或多块电池,建议保留原始分组。遇到空三失败时,可以按架次、航线或区域逐步定位问题,而不是一次性把全部影像混在一起反复试参数。
第五步:摄影测量处理和成果生成
把照片导入摄影测量软件后,通常要经历照片对齐、空三解算、像控点标记、误差检查、稠密点云生成、网格或高程模型生成、正射纠正和成果导出。每一步都要看中间结果,尤其是相机位置、连接点分布、控制点残差和检查点误差。
这一步是后期处理的核心。不要只用默认模板跑到底。对于高程成果,要关注地面点分类;对于正射影像,要关注 DSM 或 DTM 选择;对于三维模型,要关注纹理空洞、悬浮物和模型简化;对于 GIS 入库,要关注坐标系、文件格式、金字塔和 NoData。
第六步:在 GIS 软件中复核成果
正射影像、DEM 和矢量成果导出后,应放到 QGIS 或 ArcGIS Pro 中检查。重点看坐标系是否被正确识别、影像是否落在正确位置、边界是否覆盖完整、NoData 是否处理干净、等高线是否异常抖动、点云是否存在大面积漂浮点。
如果成果要进入 WebGIS,还要进一步处理切片、压缩、金字塔和坐标转换。用于浏览的底图可以优化显示效果,但用于量测和分析的数据要保留原始精度和元数据,不要为了文件小而随意重采样或改变坐标基准。
无人机测绘软件有哪些:按环节选择更稳妥
很多人搜索无人机测绘软件有哪些,其实想解决的是“我该用哪个软件完成项目”。更实用的答案不是列一个很长的名单,而是按工作环节选择。航线规划、摄影测量、点云清理、GIS 检查和成果发布,不一定由同一个软件完成。
| 环节 | 常见软件 | 适合场景 | 注意事项 |
|---|---|---|---|
| 航线规划与外业采集 | 无人机厂商控制 App、行业航测任务软件 | 设置航高、重叠度、速度、相机角度、航线范围和返航策略 | 重点不是软件名字,而是能否稳定执行航线并保存完整照片和定位记录 |
| 商业摄影测量处理 | DJI Terra、PIX4Dmapper、PIX4Dmatic、Agisoft Metashape、ArcGIS Drone2Map | 生成正射影像、点云、DSM、三维模型和质量报告 | 要看数据规模、硬件条件、坐标系统、批处理能力和团队已有经验 |
| 开源摄影测量处理 | OpenDroneMap、WebODM | 教学、预算有限、希望用开源流程生成地图、点云、DEM 和三维成果 | 需要更多环境配置和参数理解,大项目要关注硬件和处理时间 |
| GIS 检查与制图 | QGIS、ArcGIS Pro | 检查坐标、叠加底图、裁剪范围、矢量化、空间分析和制图输出 | 不要把摄影测量软件的结果直接交付,至少要在 GIS 环境中复核 |
| 点云处理 | CloudCompare、PDAL、LAStools 等 | 点云裁剪、降采样、分类、格式转换、剖面和体积辅助分析 | 点云处理会影响 DEM 和土方计算结果,参数必须记录 |
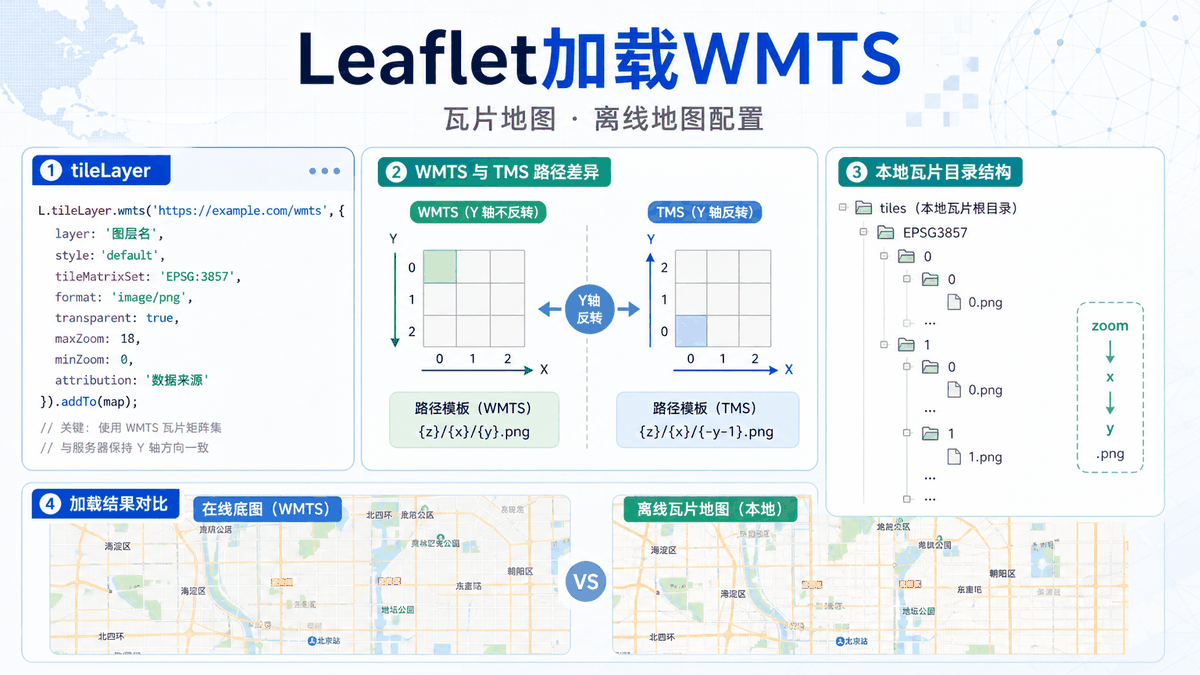
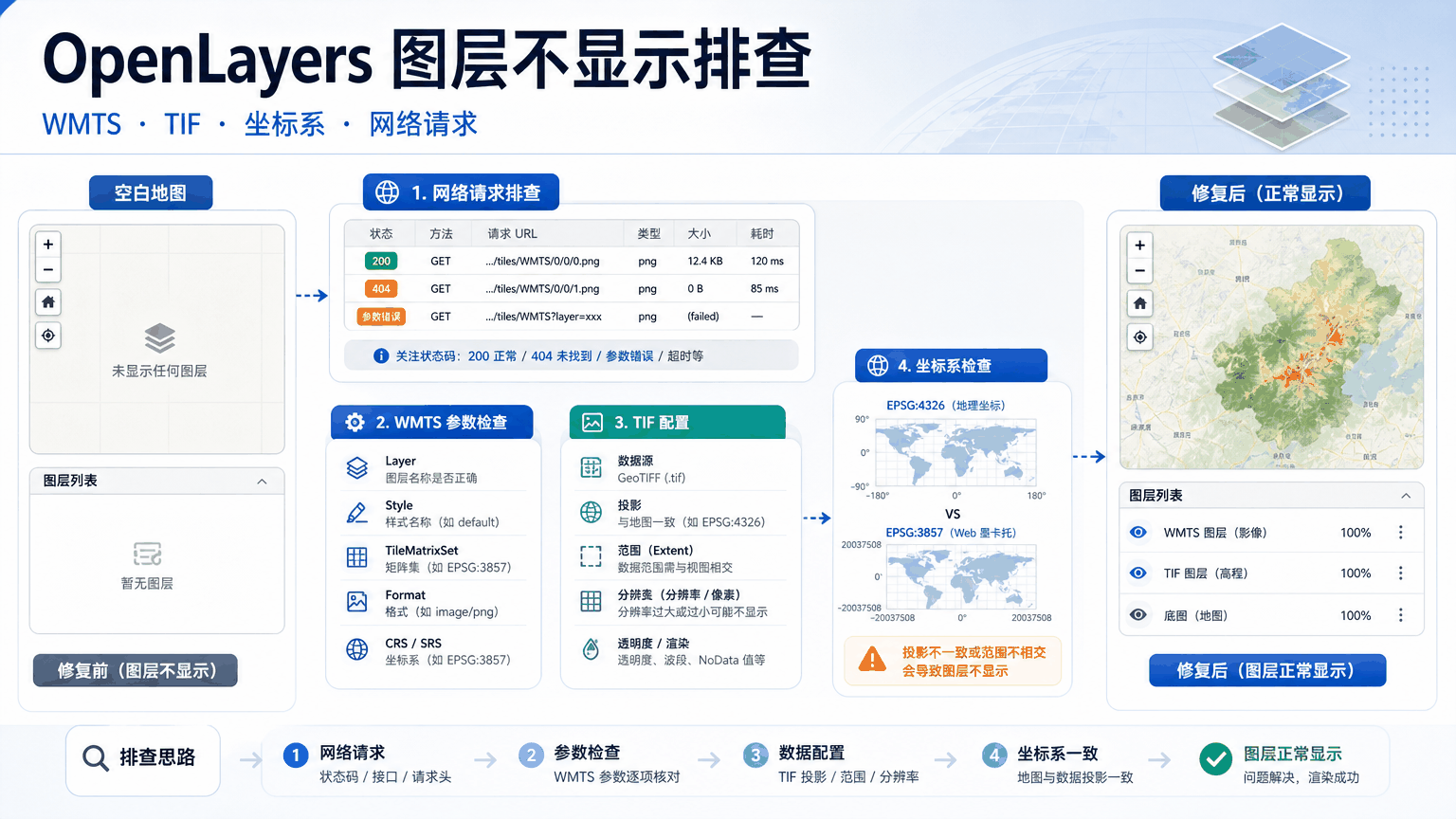
| WebGIS 发布 | GeoServer、Cesium、Mapbox/MapLibre、OpenLayers、Leaflet | 发布正射底图、3D Tiles、点云或业务图层 | 发布前要处理切片、坐标、缓存、访问权限和前端性能 |
如果是初学者,建议先用一套摄影测量软件完整跑通处理链路,再用 QGIS 做成果检查。熟悉流程后,再比较 DJI Terra、Pix4D、Metashape、Drone2Map 或 OpenDroneMap 的差异。软件选择不是越贵越稳,关键是它是否匹配你的数据来源、成果类型、坐标要求和团队维护能力。
商业软件通常在界面、质量报告、批处理、行业模板和技术支持上更友好;开源工具适合学习原理、自动化和成本受限项目;GIS 软件则负责成果复核、制图和后续分析。理解这个分工,比单纯堆软件名单更有价值。
无人机测绘数据处理:正射、DEM、点云和矢量怎么跑
无人机测绘数据处理可以拆成八个可检查节点。每个节点都要有输入、输出和质检动作,这样出问题时才能定位到具体步骤。
- 导入照片和定位数据:检查照片数量、拍摄时间、焦距、相机模型、坐标单位和 POS 数据是否完整。
- 照片对齐和空三解算:查看相机位置是否连续,连接点是否覆盖均匀,是否有孤立照片或明显飞偏的相机。
- 加入像控点:在多张照片上准确刺点,检查点号、坐标列、坐标系和高程基准。
- 优化解算:删除明显误匹配点,复核控制点残差,避免为了降低残差而错误移动标记点。
- 生成稠密点云:根据成果用途选择质量和过滤参数,检查建筑边缘、树木、水面和阴影区域。
- 生成 DSM、DTM 或 DEM:DSM 适合正射纠正和表面分析,DTM 或 DEM 需要地面点分类,不能直接把含建筑树木的 DSM 当裸地地形。
- 生成正射影像:检查接边、拉花、桥梁、立面、阴影和 NoData,必要时裁剪有效范围。
- 导出并进入 GIS:输出 GeoTIFF、LAS/LAZ、SHP/GeoPackage、OBJ、OSGB 或 3D Tiles,并在 GIS 软件中检查坐标、范围、属性和元数据。
正射影像出现破洞或拉花,通常与照片重叠不足、DSM 表面异常、建筑遮挡、水面反光和相机匹配失败有关。DEM 出现尖峰,通常与点云噪声、非地面点分类不干净、植被遮挡或水体区域处理不当有关。点云颜色异常,则要检查照片曝光、白平衡、纹理映射和影像质量。
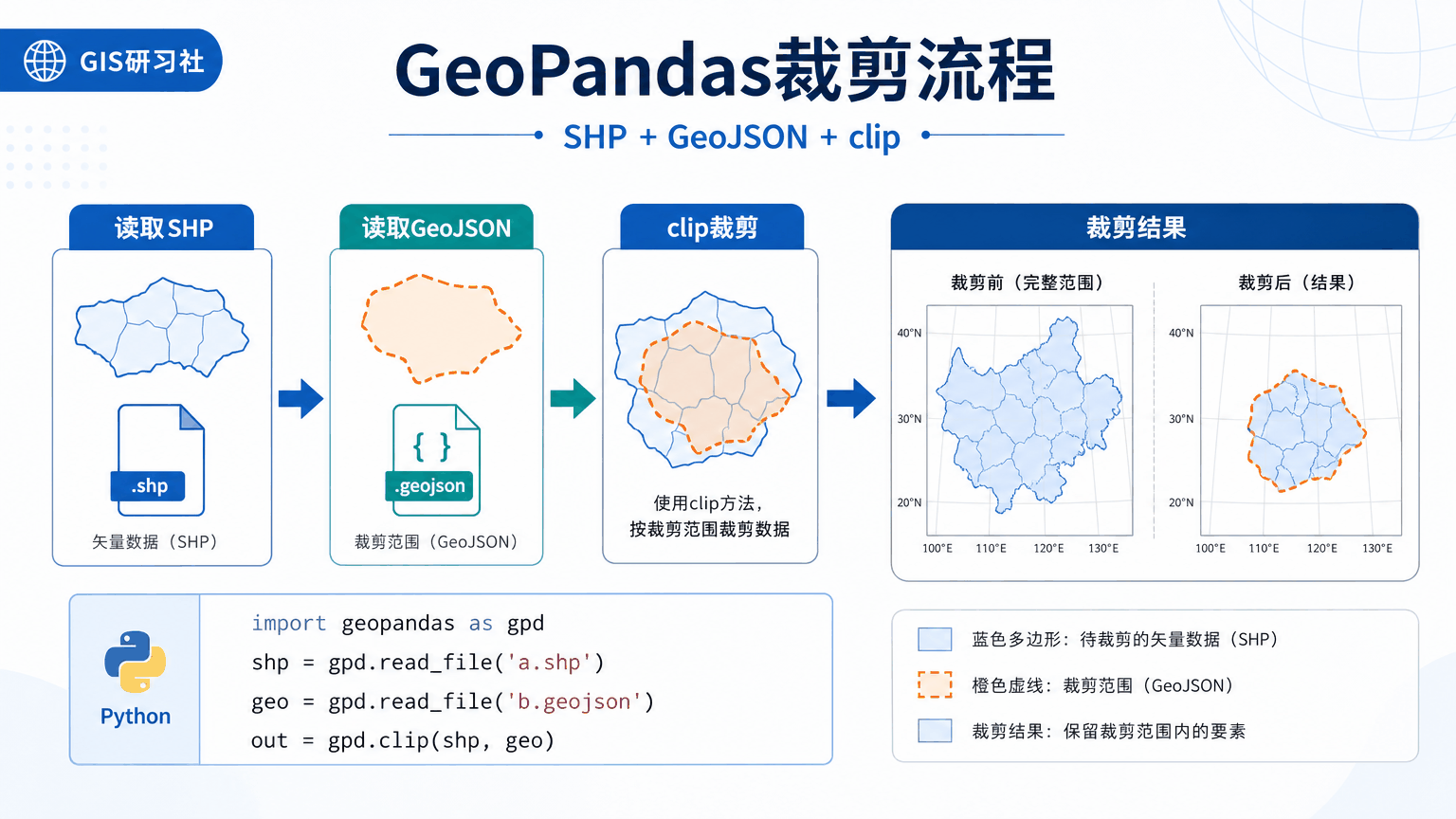
如果项目需要矢量化,建议在正射影像和 DEM 通过质检后再做。道路边线、建筑轮廓、水系和地类边界可以在 QGIS 或 ArcGIS Pro 中采集,但要注明数据来源和解译尺度。无人机正射能提供高分辨率底图,不等于所有地物边界都具备法定测绘精度。
无人机测绘精度:用检查点和成果用途来判断
无人机测绘精度不能只看“像素很清楚”。清楚是影像分辨率问题,精度是坐标与真实位置的偏差问题。一个正射影像可以非常清晰,但整体坐标偏移;也可以视觉效果一般,但检查点误差满足项目要求。
精度检查至少要区分三件事:平面精度、高程精度和相对精度。平面精度关注 X、Y 坐标偏差,常用于边界、道路和地物位置;高程精度关注 Z 值偏差,常用于 DEM、等高线和土方;相对精度关注局部形状和相邻地物关系,常用于三维模型展示和工程对比。
检查方法建议这样做:
- 使用独立检查点:不要把参与空三的 GCP 当作验收点。检查点应独立测量、独立记录、独立统计。
- 分区域查看误差:测区边缘、地形起伏区、植被区、建筑密集区往往更容易出问题。
- 分别统计平面和高程:不要只给一个综合误差。高程问题可能被平面统计掩盖。
- 对照成果用途:展示底图、地形分析、施工计量和权属辅助判读,对精度要求完全不同。
- 保存质量报告:包括控制点残差、检查点误差、相机校准、重投影误差、点云密度和输出坐标系。
| 检查对象 | 检查方法 | 异常表现 | 可能原因 |
|---|---|---|---|
| 正射影像平面位置 | 用检查点、道路交叉口或已知控制资料叠加核对 | 整体平移、旋转或局部拉伸 | 坐标系错误、像控点分布差、POS 初值异常、刺点错误 |
| DEM 高程 | 与检查点高程、断面或已有地形资料比较 | 地面起伏不合理、建筑残留、植被尖峰 | 点云分类不干净、植被遮挡、使用 DSM 代替 DTM |
| 点云质量 | 查看剖面、密度、噪声和分类结果 | 漂浮点、空洞、边缘散点、墙面破碎 | 重叠不足、照片模糊、反光水面、纹理弱区域 |
| 三维模型 | 检查建筑边缘、桥梁、立面、树冠和纹理 | 拉丝、塌陷、孔洞、纹理错位 | 倾斜影像不足、相机角度单一、遮挡严重 |
很多项目会问“成果能达到多少精度”。这个问题不能脱离航高、相机、GSD、RTK/PPK、像控点、地形、光照、软件参数和验收方法单独回答。正确表达应是:在某个项目条件下,用多少独立检查点统计得到怎样的平面误差和高程误差,并说明坐标系和高程基准。
常见坑:最容易返工的地方
- 只看航线覆盖,不看有效重叠。地形起伏、建筑遮挡和风速变化会让实际重叠低于设计值。
- 像控点分布不均匀。点都在一条路边或测区一侧,会让远端区域出现局部变形。
- 坐标系写对了,坐标列写反了。经纬度、投影坐标、X/Y 顺序和单位要逐项核对。
- 椭球高和正常高混用。高程基准不统一,会直接影响 DEM、等高线和土方量。
- 把软件质量报告当最终验收。报告里的控制点残差不能替代独立检查点统计。
- 用 DSM 直接做裸地分析。DSM 包含树木、房屋和车辆,不适合直接生成裸地等高线。
- 水面、玻璃和重复纹理区域强行建模。这些区域同名点不稳定,常出现破洞、漂浮点和纹理错位。
- 后期改投影但不记录参数。正式成果必须保留坐标系、转换参数、处理软件和输出设置。
- 只交 TIF,不交元数据。成果应包含坐标系统、采集日期、GSD、控制点说明、检查点统计和处理流程说明。
遇到问题时,排查顺序建议从外业数据开始,而不是反复更换软件。先看照片是否清晰、覆盖是否完整、POS 是否正常、像控点是否正确,再检查空三和导出参数。大多数返工问题都能在这些基础环节找到原因。
工具和方法对比:RTK、PPK、像控点和纯影像解算
不同项目对控制方式的选择不同。下面的对比可以帮助判断什么时候需要像控点,什么时候可以依赖 RTK/PPK,什么时候只能用于低精度展示。
| 方法 | 优点 | 限制 | 建议用途 |
|---|---|---|---|
| 纯影像加普通 GPS | 外业简单,适合快速演示 | 绝对位置可靠性弱,容易整体偏移 | 教学练习、粗略展示、非测绘验收场景 |
| RTK 无人机 | 照片位置初值更好,外业效率高 | 仍需检查坐标基准、固定解质量和成果误差 | 常规正射、巡检、施工记录和有检查点的项目 |
| PPK 后处理 | 适合现场网络不稳定或基站数据可控场景 | 需要保存基站、流动站和时间同步数据 | 山区、网络差区域、要求可追溯的航测项目 |
| 像控点加检查点 | 成果可验收,误差统计更可信 | 外业成本更高,需要专业测量和点位维护 | 工程测图、地形测量、土方、正式成果交付 |
| RTK/PPK 加少量像控点和检查点 | 兼顾效率和可靠性 | 仍要按项目范围合理布点 | 多数生产型无人机测绘项目 |
如果项目涉及正式量测,建议至少设置独立检查点。即使使用 RTK 或 PPK,无人机、相机、基站、高程基准、影像匹配和软件处理仍可能带来误差。检查点是判断成果是否可用的最后防线。
实战检查清单:交付成果前逐项核对
- 项目需求已明确,包括成果类型、坐标系、高程基准、精度目标和交付格式。
- 航线覆盖完整,照片无明显漏飞、模糊、过曝、欠曝和严重遮挡。
- 像控点和检查点点号一致,坐标列、单位、坐标系和高程基准已核对。
- 空三结果中相机位置连续,连接点分布均匀,没有大量孤立照片。
- 控制点残差合理,但没有用控制点残差替代检查点验收。
- 处理过程已保存项目文件、参数、报告和中间成果。
- 正射影像边缘、建筑、水面、阴影和接边区域已放大检查。
- DEM 或 DTM 已检查地面点分类,未把含建筑树木的 DSM 当裸地地形使用。
- 点云已检查噪声、密度、坐标、高程和分类,必要时进行了裁剪和降采样。
- 成果已在 QGIS 或 ArcGIS Pro 中叠加检查,不只在摄影测量软件里预览。
- 输出 GeoTIFF、LAS/LAZ、矢量、三维模型和报告文件命名清晰,坐标信息完整。
- 最终报告包含采集日期、设备、航高、GSD、控制点、检查点、处理软件和质量结论。
这份清单适合每次交付前复用。它的价值不在于形式,而在于让航测工作从“跑软件”变成可审计、可复现、可解释的 GIS 数据生产流程。
FAQ:流程、软件和精度
无人机测绘软件有哪些,初学者先学哪个?
无人机测绘软件有哪些要按环节看。摄影测量处理常见有 DJI Terra、PIX4Dmapper、PIX4Dmatic、Agisoft Metashape、ArcGIS Drone2Map、OpenDroneMap 和 WebODM;成果检查常用 QGIS 或 ArcGIS Pro;点云可用 CloudCompare、PDAL 等。初学者建议先选一套摄影测量软件跑完整流程,再学习 QGIS 检查坐标和成果质量。
无人机测绘流程中最关键的一步是什么?
无人机测绘流程没有单一万能步骤。如果必须排序,最容易决定成败的是外业采集和控制点设计。照片清晰、重叠足够、像控点和检查点分布合理,后期处理才有基础。外业数据有缺陷时,软件参数只能有限补救。
无人机测绘数据处理为什么正射影像会破洞或拉花?
正射破洞常见原因是照片重叠不足、影像模糊、水面反光、纹理弱、DSM 异常或建筑遮挡。先检查相机对齐和点云,再检查 DSM 或 DTM,最后看正射纠正参数。不要只反复导出 TIF。
无人机测绘精度能达到多少?
无人机测绘精度不能脱离项目条件给统一答案。它受 GSD、相机、航高、RTK/PPK、像控点、检查点、地形、光照、软件参数和坐标基准影响。正式表达应使用独立检查点统计结果,分别说明平面误差和高程误差,并注明坐标系与高程基准。
有 RTK 无人机还需要像控点吗?
RTK 可以提高照片定位质量,但不自动等于最终成果合格。对正式项目,仍建议布设检查点;对精度要求高、坐标基准复杂或要做高程成果的项目,像控点也很有必要。是否减少像控点,应由项目精度要求和检查点统计结果决定。
处理出来的正射影像在 QGIS 或 ArcGIS Pro 里位置偏了怎么办?
先检查坐标系是否定义正确,再检查是否把经纬度和投影坐标混用、X/Y 列是否颠倒、单位是否错误、高程基准是否混用。然后回到摄影测量项目,看像控点刺点、控制点坐标和导出坐标系。不要直接在 GIS 里手动平移成果当作修正。
DSM 和 DEM 应该先生成哪个?
正射纠正常常需要表面模型参与,DSM 可以保留建筑、树木等地表物体;如果要做地形分析、等高线或土方量,更需要经过地面点分类的 DEM 或 DTM。处理时要先明确用途,再决定输出哪一种高程模型。
只做展示底图,还要检查精度吗?
要检查,但检查深度可以与用途匹配。展示底图至少要确认位置没有明显偏移、比例尺下无严重拉花、边界覆盖完整、坐标系正确。如果底图会参与量测、面积统计或工程决策,就必须按项目要求做独立检查点统计。
结论
稳定的航测项目不是从选择软件开始,而是从成果需求、航线设计、像控点和检查点开始。软件负责把影像、控制点和参数转化为正射影像、DEM、点云和三维成果,但它不能替代外业质量和精度验收。
如果你正在搭建自己的项目流程,可以按本文顺序执行:先明确成果和精度目标,再设计航线与控制点,之后完成外业采集、摄影测量处理、GIS 复核和检查点统计。理解软件选择只是第一步,真正决定项目质量的是可复现的处理过程和可解释的质量报告。
-
QGIS虚拟图层SQL查询:连接表和空间筛选 2026-06-13 01:55:21
-
DEM流向:水文分析和流域划分前处理 2026-06-13 01:50:34
-
无人机正射影像:航测正射和影像正射流程 2026-06-12 22:19:43
-
无人机航测精度:像控点布设和飞行高度计算 2026-06-12 20:49:03
-
OpenLayers点击事件:图层点击事件和坐标拾取 2026-06-12 01:38:49
-
QGIS Processing报错:Processing错误和处理工具箱打不开 2026-06-11 20:55:46
-
Sentinel2云掩膜:大气校正、GEE去云和NDVI检查 2026-06-11 13:42:34
-
ArcGIS Pro字段计算器:数值涵义和顺序编号 2026-06-11 11:39:27
-
ArcPy栅格计算:arcpy.sa和栅格计算器排查 2026-06-11 10:48:22
-
ArcPy字段计算:AddField、字段映射和更新游标 2026-06-11 09:49:34
-
Leaflet加载WMTS:瓦片地图和离线地图配置 2026-06-11 03:40:08
-
ArcPy投影转换:定义投影、重投影和空间参考 2026-06-10 20:51:20
-
OpenLayers图层不显示:WMTS、TIF加载和原因排查 2026-06-10 19:22:44
-
ArcPy批量裁剪:批处理栅格处理和输出检查 2026-06-10 18:47:40
-
GeoPandas裁剪:clip、读取SHP和GeoJSON裁剪流程 2026-06-10 08:45:06
-
ArcPy批量出图:arcpy.mp导出PDF和批量制图 2026-06-10 08:40:05
-
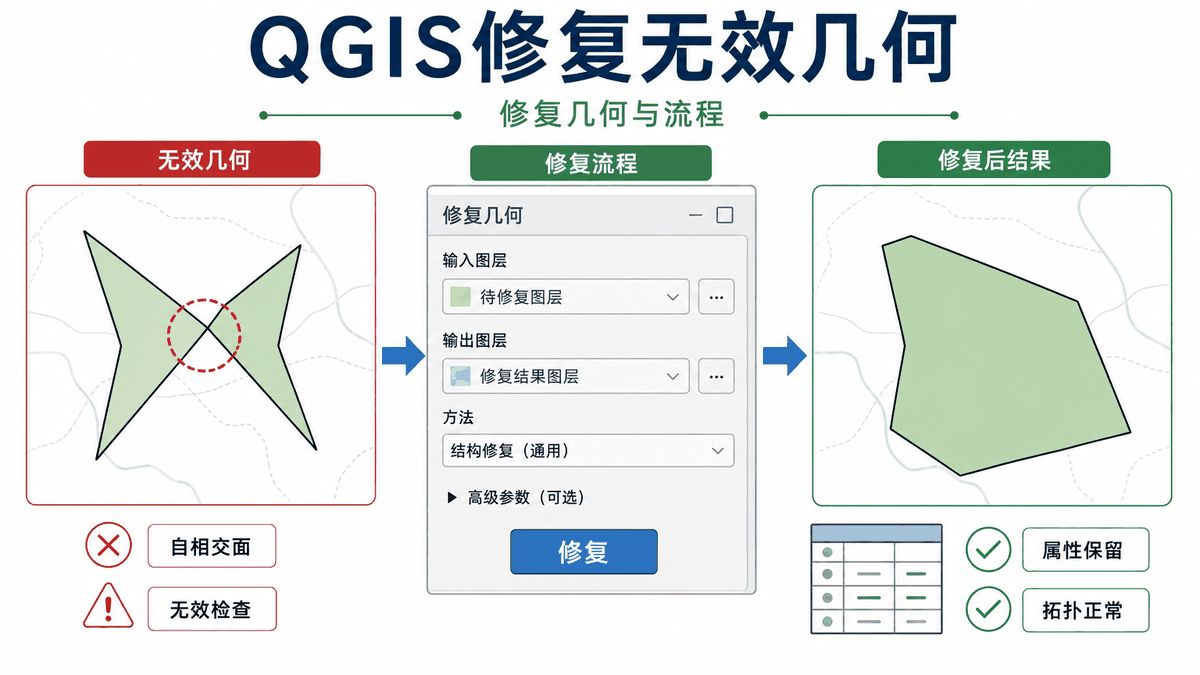
QGIS修复无效几何:修复几何和几何修复流程 2026-06-10 03:48:19
-
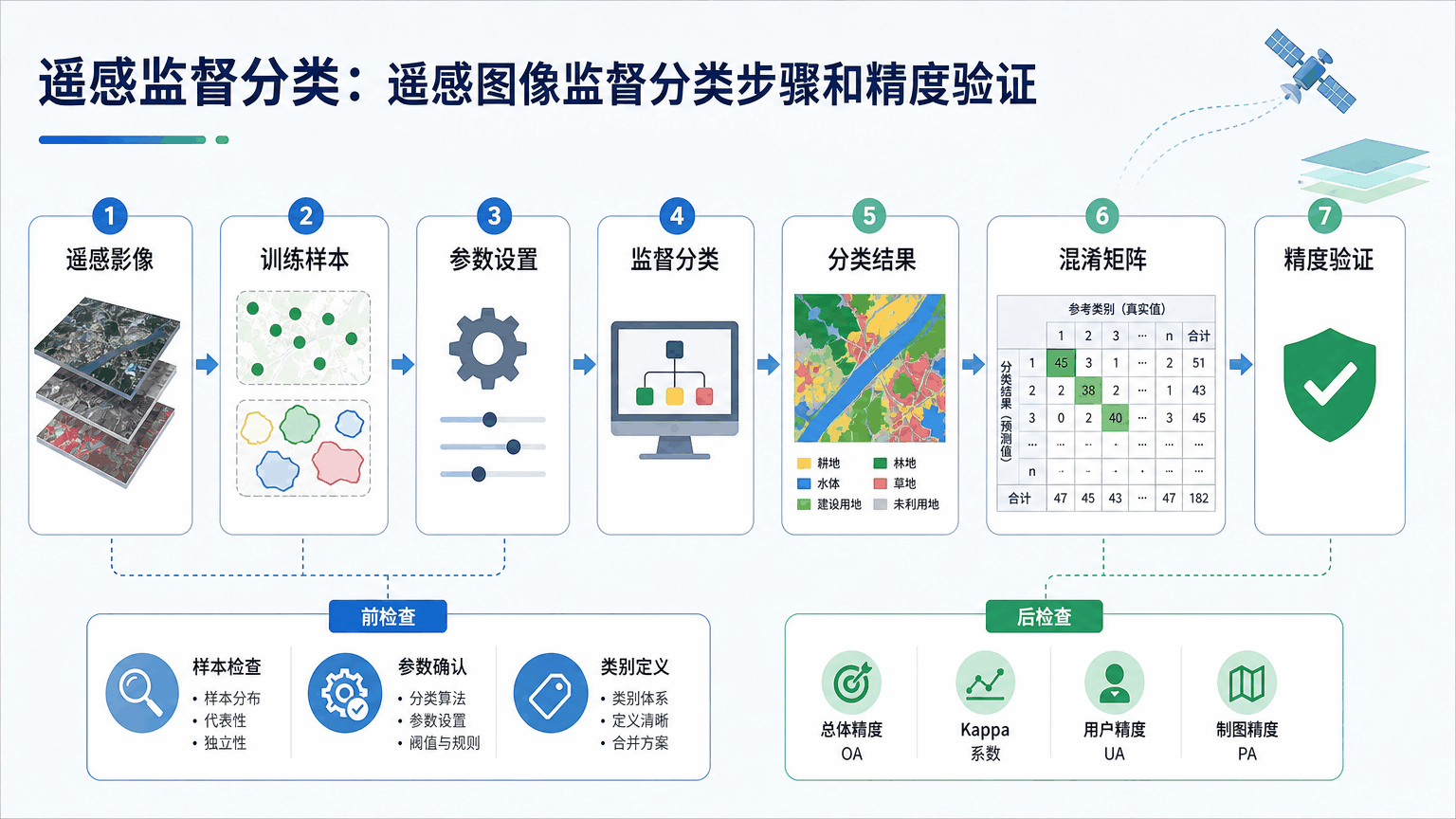
遥感监督分类:遥感图像监督分类步骤和精度验证 2026-06-09 18:16:55
-
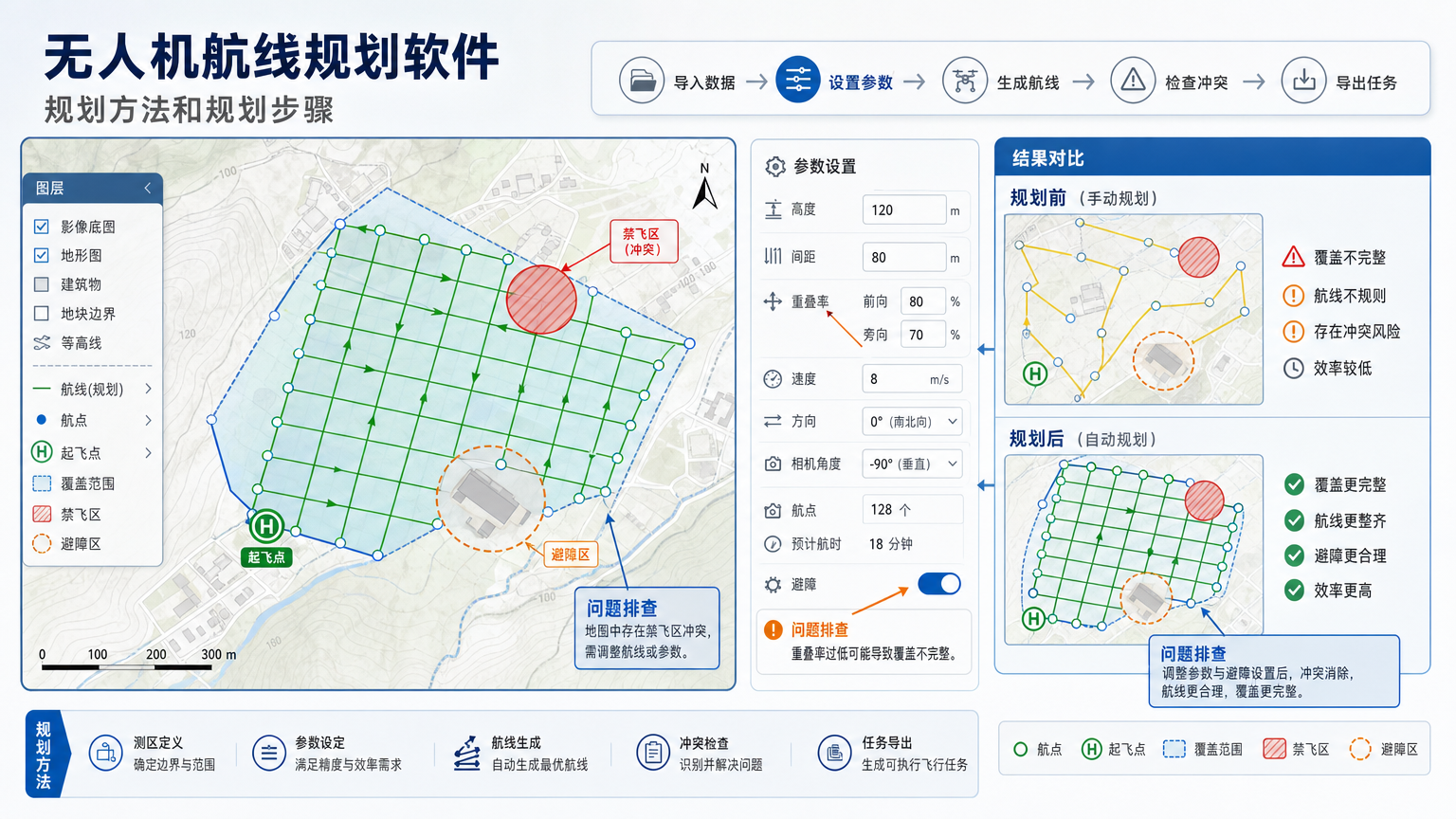
无人机航线规划软件:规划方法和规划步骤 2026-06-09 15:16:34
-
Cesium影像加载失败:本地影像和TIF加载排查 2026-06-09 09:02:22