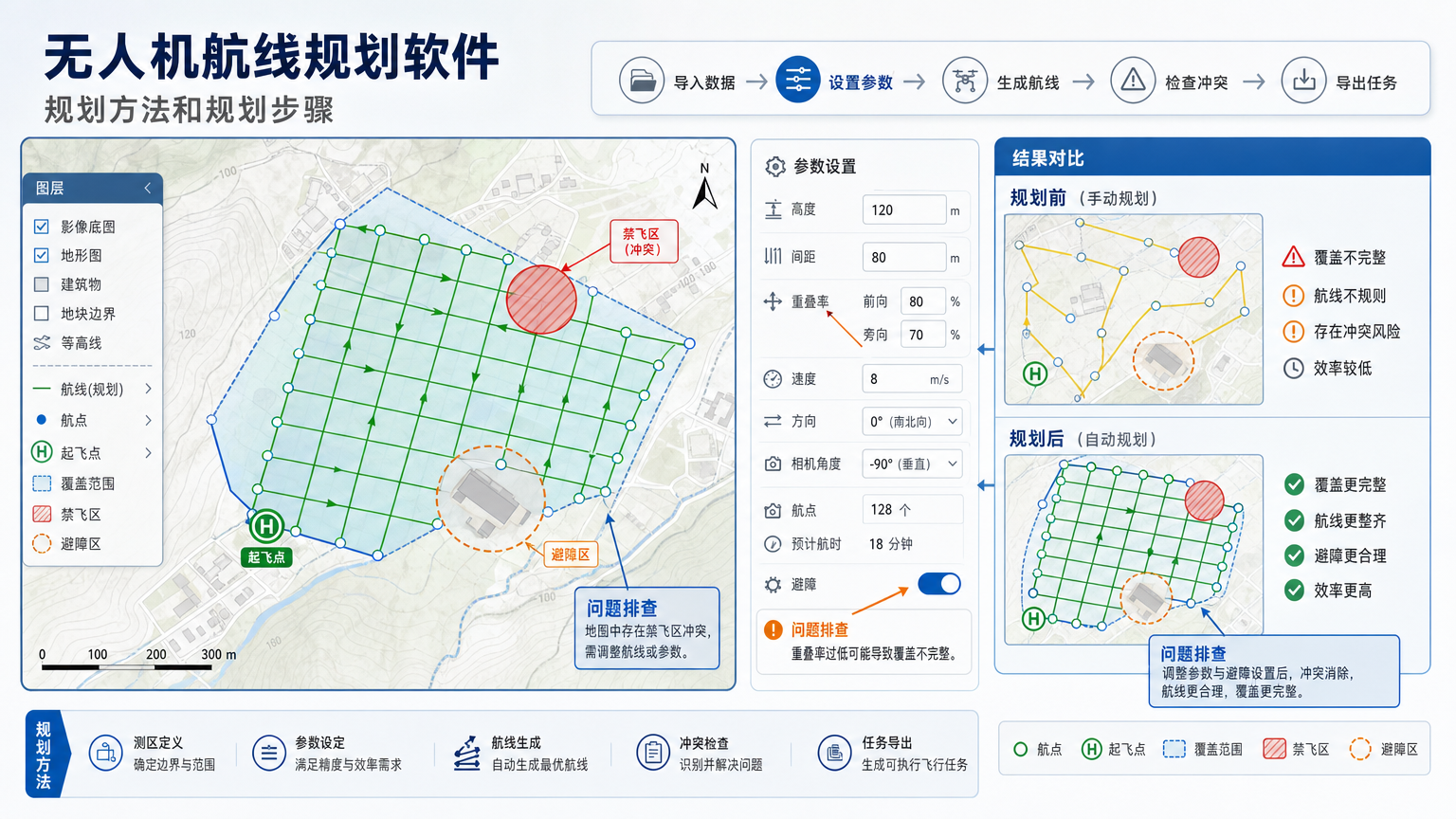
无人机航线规划软件:规划方法和规划步骤
无人机航线规划软件:规划方法和规划步骤
做低空遥感或无人机 GIS 项目时,无人机航线规划不是把飞机在地图上画几条线那么简单。它直接决定影像重叠率、地面分辨率、空三稳定性、作业效率和飞行安全。很多航测成果后期拼不起来、局部拉花、边缘缺图,并不是建模软件的问题,而是前期航线参数没有按测区、地形和成果要求设计。
本文面向 GIS 学习者、航测入门工程师和低空遥感项目执行人员,讲清楚常见航线规划工具怎么选,实际项目中可复用的规划思路是什么,以及一套从 GIS 边界数据到飞行任务的执行流程。重点不是背参数,而是理解为什么这样规划。
问题背景:为什么同一块测区飞出来的成果差很多
同样一块地,有的人飞完可以顺利生成正射影像和三维模型,有的人飞完却出现空三失败、道路错位、建筑拉伸、边缘缺片。差异通常不在“无人机好不好”,而在任务前是否把测区条件转换成可执行的航线参数。
一个完整的低空遥感任务至少涉及四类信息:测区边界、成果要求、飞行环境和设备能力。测区边界可以来自 QGIS、ArcGIS Pro、CAD、SHP、GeoJSON 或 KML;成果要求可能是正射图、DSM、倾斜摄影三维模型、巡检影像或植被指数;飞行环境包括地形起伏、障碍物、空域限制、起降点和天气;设备能力则包括相机焦距、传感器尺寸、续航、RTK、避障和是否支持地形跟随。
如果只在 App 里随手画一个矩形,然后默认高度、默认重叠率直接起飞,后处理风险会被推迟到建模阶段才暴露。正确的无人机航线规划应该在飞行前就把这些风险显性化。
核心原理:航线不是路线,而是影像采集方案
从 GIS 角度看,航线规划本质上是一套空间采样方案。无人机按航线飞行,相机按设定间隔拍照,后处理软件再利用影像之间的共同特征点进行空三解算、正射纠正、点云生成或三维重建。航线越合理,影像之间的几何关系越稳定,后期成果越容易可靠生成。
几个核心参数需要先理解:
- 航高。航高影响地面分辨率,也影响单张影像覆盖范围。航高越低,细节越清楚,但照片数量、飞行架次和遮挡风险都会增加。
- GSD。GSD 是地面采样距离,可以理解为一个像素代表的地面长度。成果要求 2 cm、5 cm 或 10 cm,反推出来的航高完全不同。
- 航向重叠率。同一航线前后相邻照片的重叠比例,主要影响空三连接和前进方向连续性。
- 旁向重叠率。相邻航线之间的重叠比例,主要影响横向拼接、边缘区域和三维建模稳定性。
- 航线方向。航线方向应结合测区形状、地形坡向、风向、建筑排列和太阳角度判断,不是永远默认东西向或南北向。
- 安全余量。包括障碍物高度、返航高度、起降点、禁飞区、缓冲区、备用电量和通信链路。
好的航线不是最短的航线,而是在安全边界内,用足够稳定的影像重叠关系覆盖目标区域。
无人机航线规划方法:从成果反推参数
最稳妥的无人机航线规划方法是从最终成果反推,而不是从软件默认值出发。先问清楚项目要什么,再决定怎么飞。正射影像、三维建模、地形测绘和巡检取证,对航线参数的要求并不一样。
如果目标是正射影像,重点是保证垂直影像覆盖完整、地面控制点清晰、边界外有足够外扩。常见做法是规划网格航线,保持较高航向和旁向重叠率,测区边界外再加一定缓冲,避免成果边缘缺图。
如果目标是倾斜摄影三维模型,单一正射航线通常不够。需要组合正射航线和多方向倾斜航线,让建筑立面、桥梁侧面、边坡和树冠侧面获得足够影像。此时航线方向、云台角度、飞行高度和遮挡关系要一起考虑。
如果目标是线状巡检,例如河道、道路、管线或电力通道,航线应沿对象走向布设,并结合缓冲带宽度、转弯半径、拍摄角度和安全距离。线状任务不一定适合用矩形测区网格直接覆盖,否则效率低,电量浪费明显。
如果目标是灾害应急或快速踏勘,优先级会变成速度、安全和覆盖,而不是最高分辨率。此时可以适当提高航高、减少架次,先获得整体影像,再对重点区域补飞高分辨率航线。
无人机航线规划步骤:从 GIS 边界到飞行任务
下面是一套可复用的无人机航线规划步骤,适合大多数低空遥感和无人机 GIS 作业。不同软件界面不一样,但逻辑基本相同。
步骤一:整理测区边界和坐标系统
先在 QGIS 或 ArcGIS Pro 中检查测区边界。边界数据可以是 SHP、GeoJSON、KML、DXF 或项目红线。重点检查四件事:坐标系是否正确、边界是否闭合、是否有自相交、是否需要外扩缓冲。
如果边界来自 CAD 或地方坐标,需要转换到航线软件支持的坐标系统,常见是 WGS84 经纬度或软件要求的 KML 坐标。不要把 CGCS2000 投影坐标、地方独立坐标直接当经纬度导入,否则航线可能偏到很远的位置。
步骤二:明确成果类型和精度要求
在设置航高之前,先写清楚成果目标。例如:正射影像分辨率 5 cm、三维模型用于规划展示、植被监测需要多光谱影像、土方测量需要点云和 DSM。成果类型决定航高、重叠率、相机角度和是否需要地面控制点。
如果甲方只说“越清楚越好”,要继续追问应用场景。用于巡查的影像和用于测绘的成果不是同一套参数。把需求写清楚,是避免返工的第一步。
步骤三:根据 GSD 反推航高
航高不是凭经验随便填。应根据相机参数和目标 GSD 反推,再结合当地法规、空域、障碍物和设备性能修正。多数航线规划工具会根据机型和相机自动估算 GSD,但仍要人工复核。
例如同样是 5 cm GSD,不同相机、镜头和传感器尺寸对应的航高并不一致。软件能帮助计算,但不能替代项目判断。若测区存在高楼、山地或电塔,实际安全航高还要高于单纯 GSD 计算值。
步骤四:设置航向和旁向重叠率
重叠率决定影像之间能否形成稳定连接。平坦农田、裸地、规则地块可以使用相对常规的重叠设置;建筑密集区、林地、水面、雪地、重复纹理区域、陡坡和峡谷则需要更高重叠率和更谨慎的航线方向。
对于三维建模,旁向重叠率尤其重要。过低的旁向重叠会让相邻航带之间缺少共同特征,后处理时容易断层、拉花或局部模型塌陷。对于水面和玻璃幕墙等弱纹理区域,光靠提高重叠率也不一定能完全解决,需要结合地面控制点、补拍角度和任务拆分。
步骤五:选择航线方向和测区外扩
航线方向应结合测区形状和地物分布选择。狭长测区通常沿长边布设效率更高;坡地可考虑与等高线方向、主坡向和太阳方向结合;城市街区要关注高楼阴影和遮挡;农田和林地要避免整组航片都被单一纹理影响。
测区边界外扩也很关键。正射影像边缘容易因为照片覆盖不足产生变形或缺口,所以航线不应刚好压着红线飞。可以在 GIS 中预先对测区做缓冲,再导入航线软件作为规划范围。
步骤六:检查地形、障碍物和空域限制
平原测区可以使用固定相对高度,山地、矿山、峡谷和高差大的园区则要评估地形跟随。若软件、机型或数据源支持地形跟随,也要检查地形数据精度和更新情况;如果不支持,应把测区拆分成多个高程相近的小区块分别规划。
同时要标出高压线、通信塔、树木、楼宇、临时吊装设备和禁飞缓冲区。GIS 中可以把障碍物做成点、线、面图层,用于飞行前风险检查。航线规划不应只看二维底图,还要看三维高度风险。
步骤七:拆分任务、估算电量并设置返航策略
大测区不要强行放进一个任务。按电池续航、起降点距离、风向、地形和通信条件拆分航线,通常更安全。每个任务都要估算照片数量、飞行时间、返航余量和换电位置。
返航高度要高于已知障碍物,并留出安全余量。若测区附近有高楼、山脊或塔架,默认返航高度可能不足。这个参数常被忽略,但它直接关系到失联返航和低电返航安全。
步骤八:导出任务前做模拟和清单复核
起飞前至少复核航线预览、相机触发间隔、云台角度、航高、速度、重叠率、边界外扩、起降点、返航高度、禁飞区和电量。若软件支持仿真或预览,应查看每条航线是否穿越障碍物或超出遥控通信范围。
最后把任务文件、测区边界、参数截图和当天飞行记录统一归档。这样后续空三失败或成果有问题时,可以回溯是航线参数、飞行环境还是后处理设置导致的。
无人机航线规划原则:安全、覆盖、精度和效率
无人机航线规划原则可以归纳为四个词:安全、覆盖、精度、效率。实际项目中,这四者经常互相制约,需要根据任务目标排序。
- 安全优先。空域、天气、障碍物、人员车辆、起降点和返航路线都要先确认。任何成果精度都不能排在飞行安全之前。
- 覆盖完整。航线应覆盖测区和必要缓冲区,避免红线边缘缺图。对于复杂建筑和山地,覆盖要包含侧面和高差区域。
- 精度匹配。不要盲目追求最低航高。过低航高会增加照片数量、飞行风险和拼接难度。精度应与业务用途匹配。
- 效率可控。航线应考虑电池、换电、转场和后处理时间。不是照片越多越好,冗余要服务于成果质量。
- 参数可追溯。每次任务的航高、重叠率、航速、云台角度、相机模式和边界版本都应留档。
这些原则看起来基础,但在真实项目中最容易被赶工节奏打乱。越是紧急任务,越需要用清单控制风险。
常见航线规划软件怎么选
选择无人机航线规划软件时,不要只看界面是否好看,而要看它是否支持你的机型、飞控、相机、成果类型和作业环境。软件选型可以按“飞行控制、GIS 预处理、航测后处理”三类拆开看。
| 软件类型 | 典型用途 | 适合场景 | 注意点 |
|---|---|---|---|
| 厂商飞行 App | 执行航线、设置相机、控制飞行任务 | 使用特定品牌无人机和标准测绘任务 | 要确认机型、固件、地区限制和任务类型是否支持 |
| 专业航线软件 | 复杂航线、地形跟随、多平台任务管理 | 山地、矿山、线状巡检、复杂低空遥感项目 | 学习成本较高,需确认飞控兼容性和数据授权 |
| 开源或飞控生态软件 | PX4、ArduPilot 等飞控任务规划和调试 | 科研、教学、开发和自组平台 | 参数自由度高,但责任边界和安全检查更依赖操作者 |
| GIS 软件 | 边界整理、缓冲区、障碍物图层、坐标转换 | 需要从项目红线、地块、道路、管线生成任务范围 | 它通常不直接执行飞行,需要与航线软件衔接 |
| 航测后处理软件 | 空三、正射、点云、DSM、三维模型 | 验证航线成果质量,反推下一次补飞策略 | 后处理不能完全弥补前期航线设计错误 |
常见工具组合是:先用 QGIS 或 ArcGIS Pro 处理测区边界和缓冲区,再导入支持当前机型的飞行软件生成航线,飞行后用航测后处理软件检查空三质量和成果覆盖。具体产品名称可以包括厂商自带飞行软件、专业航线平台、QGroundControl、Mission Planner 等,但最终要以你的机型、飞控和官方支持清单为准。
如果只是学习规划思路,建议先从小测区、开阔地、标准网格航线练起。等理解航高、GSD、重叠率和边界外扩后,再处理山地、城市、线状巡检和多航线组合任务。
常见坑点:软件能生成航线,不代表任务已经可靠
- 坐标系导错。KML 使用经纬度,SHP 可能是投影坐标。导入前必须确认坐标系统,不能只看图形形状。
- 边界没有外扩。红线边缘正好被航片边缘覆盖,后期正射成果很容易缺口或变形。
- 重叠率照抄默认值。默认参数不一定适合林地、坡地、城市高楼、水面和重复纹理区域。
- 忽略风向和光照。强风会影响航线稳定,低太阳角会增加阴影,都会降低影像匹配质量。
- 返航高度过低。起飞点附近安全,不代表返航路径安全。高楼、山脊和塔架必须单独检查。
- 航速过快。航速过快可能造成运动模糊、触发间隔不足和影像质量下降。
- 山地用固定高度硬飞。地形起伏大时,固定高度会导致局部 GSD 差异和重叠率变化,必要时应拆区或使用可靠的地形跟随方案。
- 只看飞行成功,不看成果质量。无人机顺利返航只是完成采集,是否满足 GIS 成果要求还要看空三、控制点误差、正射边界和模型完整性。
实用检查清单:起飞前、飞行中、飞行后分别看什么
把检查动作分阶段,比临起飞时靠记忆更可靠。
起飞前检查
- 测区边界、缓冲区和禁飞区是否正确导入。
- 航高、GSD、航向重叠率、旁向重叠率是否符合成果要求。
- 起降点、返航高度、备用降落点和通信范围是否明确。
- 电池、存储卡、RTK、相机模式、快门速度和云台角度是否检查完成。
- 天气、风速、光照、现场人员和车辆风险是否可控。
飞行中检查
- 无人机是否按航线稳定飞行,是否频繁偏航或暂停。
- 照片触发是否正常,剩余电量和预计返航时间是否安全。
- 遥控链路、图传、RTK 状态和相机曝光是否异常。
- 现场是否出现临时障碍物、人员进入或天气突变。
飞行后检查
- 照片数量是否与软件预估接近,是否存在大面积漏拍。
- 照片清晰度、曝光、模糊、过曝和欠曝是否合格。
- 影像 POS、RTK 状态、控制点照片和日志是否完整。
- 快速跑一次空三或预览拼接,检查边界、弱纹理区域和重点地物。
这套清单可以作为每次无人机航线规划和外业执行的记录模板。记录越完整,下一次补飞和复盘越省时间。
FAQ:航线规划软件、方法和步骤
无人机航线规划软件是不是越专业越好?
不一定。这类软件要先匹配机型、飞控、任务类型和操作者能力。标准农田正射任务可能用厂商飞行 App 就够了;山地地形跟随、线状巡检或多平台项目,才更需要专业软件。软件越复杂,参数自由度越高,也越需要操作者理解风险。
无人机航线规划方法里最容易忽略的是什么?
最容易忽略的是从成果反推参数。很多人先打开软件画范围,再接受默认航高和重叠率。正确做法应先明确成果类型、GSD、测区地形、地物纹理和安全约束,再设置航线。
无人机航线规划步骤中为什么要先处理 GIS 边界?
因为边界决定航线覆盖范围。若 SHP、GeoJSON 或 KML 的坐标系错误,后续航高、重叠率和电量估算都没有意义。规范流程应先在 GIS 软件中检查坐标、拓扑、缓冲区和禁飞区,再进入飞行软件。
无人机航线规划原则中安全和精度冲突怎么办?
安全优先。若低航高可以提高分辨率但会接近树冠、电线或建筑,应提高航高、增加重叠率、拆分测区或调整起降点。不要为了追求细节牺牲安全余量。
正射影像和三维建模可以用同一条航线吗?
小范围、低建筑密度的测区有时可以先用正射航线获得基础成果,但复杂三维建模通常需要额外倾斜航线或多方向补拍。正射航线主要获取顶视信息,建筑立面、桥梁侧面和坡面遮挡区域需要更多角度。
航线规划完成后还需要现场踏勘吗?
需要。底图可能过时,现场可能有临时吊车、施工围挡、高压线、树木增长或人员活动。线上规划只能完成空间设计,现场踏勘负责确认真实安全条件。
结论:把航线规划当成 GIS 项目的前置设计
无人机航线规划应该被看作 GIS 数据生产流程的第一步,而不是外业人员起飞前的临时操作。先用 GIS 数据整理测区边界,再根据成果要求反推航高、GSD、重叠率和航线方向,最后用合适的软件执行和复核任务,才能减少返工。
对初学者来说,最重要的是建立一套稳定流程:边界检查、需求确认、参数设置、安全复核、飞行记录、成果验证。掌握这套流程后,再换不同品牌的软件或不同类型的无人机,核心判断也不会乱。
-
QGIS虚拟图层SQL查询:连接表和空间筛选 2026-06-13 01:55:21
-
DEM流向:水文分析和流域划分前处理 2026-06-13 01:50:34
-
无人机正射影像:航测正射和影像正射流程 2026-06-12 22:19:43
-
无人机航测精度:像控点布设和飞行高度计算 2026-06-12 20:49:03
-
OpenLayers点击事件:图层点击事件和坐标拾取 2026-06-12 01:38:49
-
QGIS Processing报错:Processing错误和处理工具箱打不开 2026-06-11 20:55:46
-
Sentinel2云掩膜:大气校正、GEE去云和NDVI检查 2026-06-11 13:42:34
-
ArcGIS Pro字段计算器:数值涵义和顺序编号 2026-06-11 11:39:27
-
ArcPy栅格计算:arcpy.sa和栅格计算器排查 2026-06-11 10:48:22
-
ArcPy字段计算:AddField、字段映射和更新游标 2026-06-11 09:49:34
-
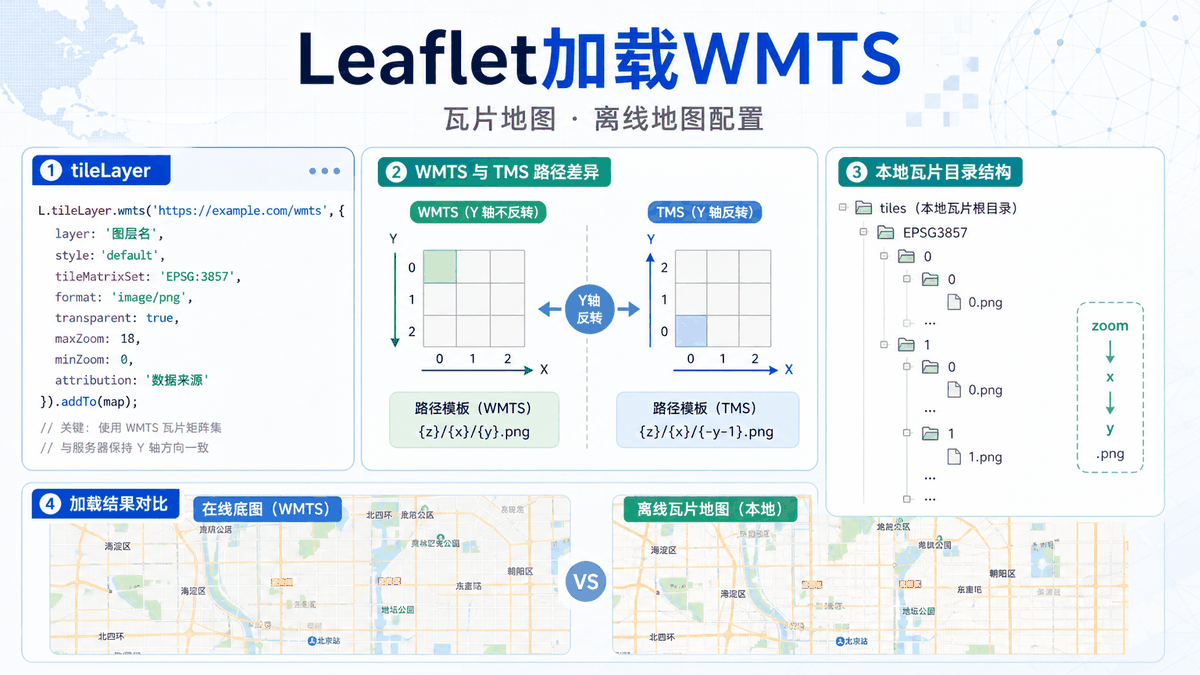
Leaflet加载WMTS:瓦片地图和离线地图配置 2026-06-11 03:40:08
-
ArcPy投影转换:定义投影、重投影和空间参考 2026-06-10 20:51:20
-
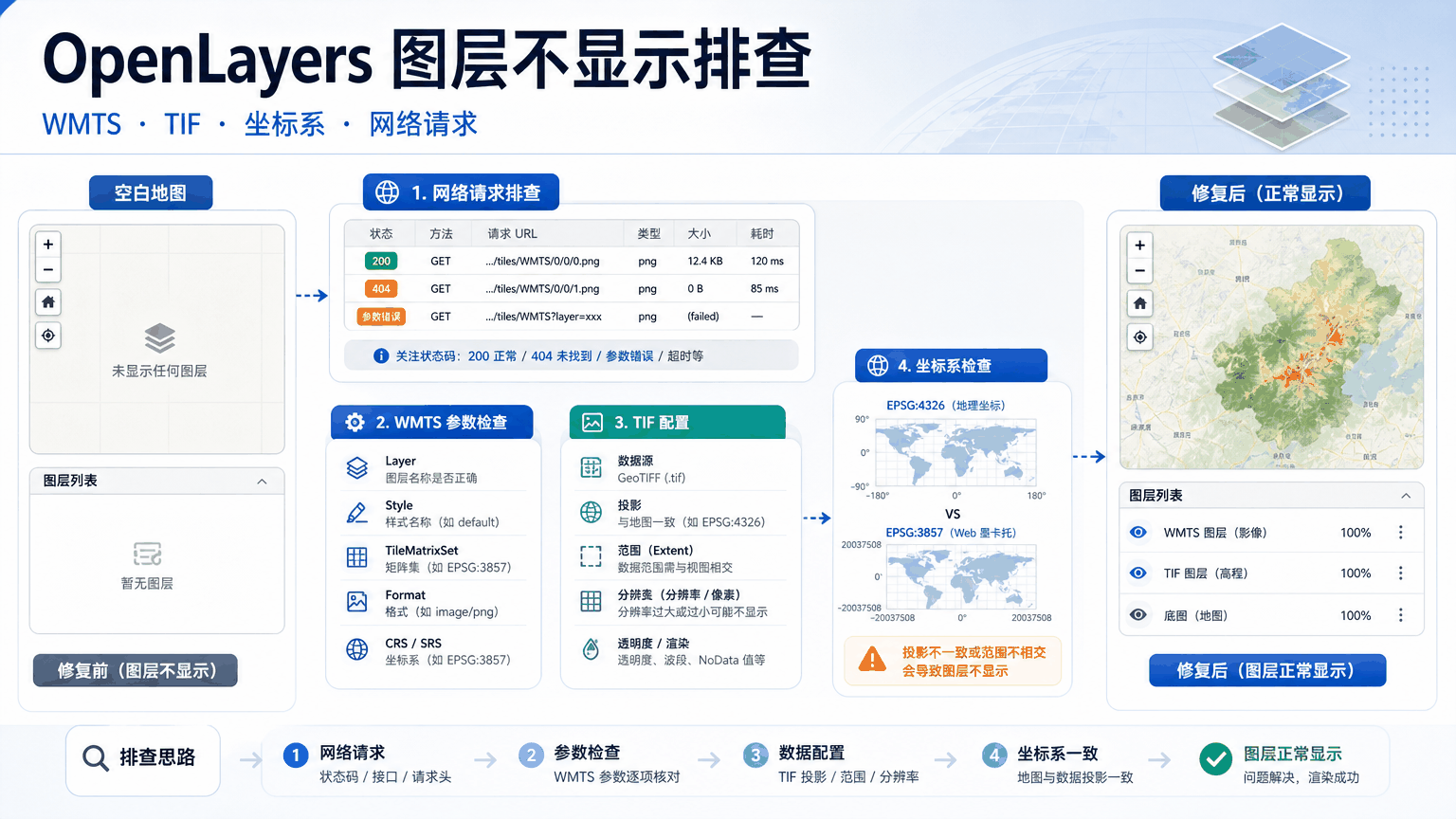
OpenLayers图层不显示:WMTS、TIF加载和原因排查 2026-06-10 19:22:44
-
ArcPy批量裁剪:批处理栅格处理和输出检查 2026-06-10 18:47:40
-
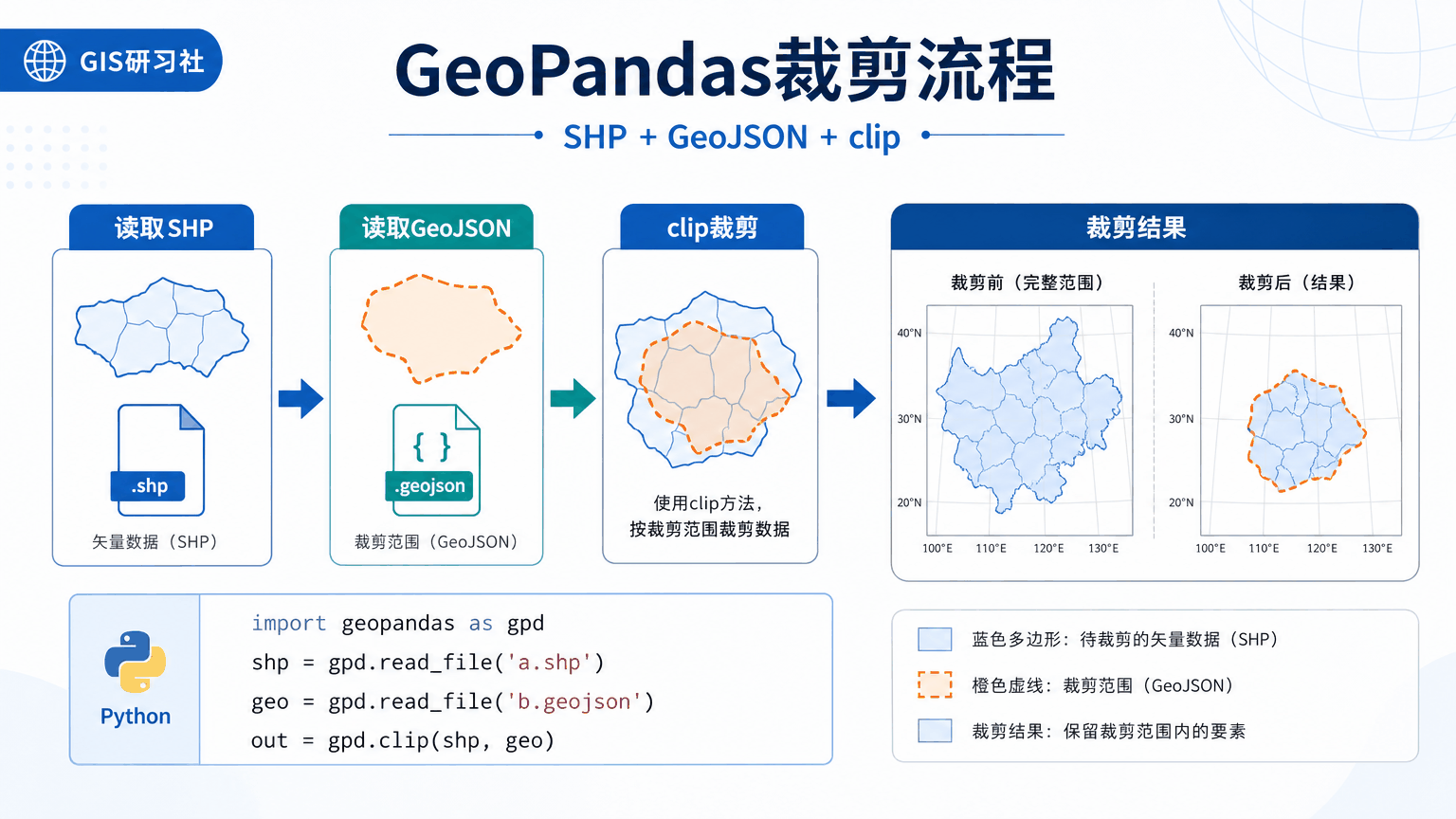
GeoPandas裁剪:clip、读取SHP和GeoJSON裁剪流程 2026-06-10 08:45:06
-
ArcPy批量出图:arcpy.mp导出PDF和批量制图 2026-06-10 08:40:05
-
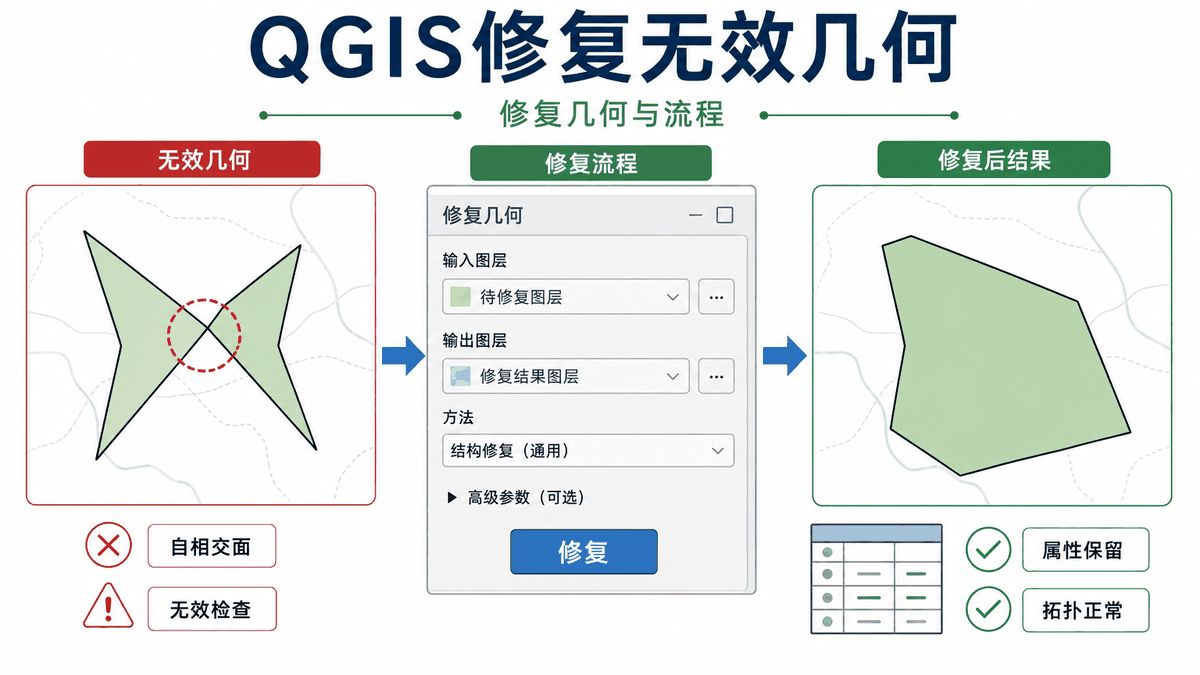
QGIS修复无效几何:修复几何和几何修复流程 2026-06-10 03:48:19
-
遥感监督分类:遥感图像监督分类步骤和精度验证 2026-06-09 18:16:55
-
无人机测绘流程:软件有哪些、数据处理和精度 2026-06-09 13:32:14
-
Cesium影像加载失败:本地影像和TIF加载排查 2026-06-09 09:02:22